¡Hola, Estudiantes del presente y futuros ingenieros y mentes creativas del mañana!
Seguramente, cuando escuchan la palabra «Robot», les vienen a la mente imágenes épicas de películas como Terminator o Yo, Robot. Pero, lo cierto es que, aunque por décadas la robótica fue un tema exclusivo de la ciencia ficción, hoy en día, es una realidad absoluta que nos rodea, desde la fábrica hasta nuestra propia casa. Estamos en un momento de gran revolución donde la Robótica y la Inteligencia Artificial (IA) se fusionan para transformar el mundo actual en el que vivimos.
Y por ello, hoy les traemos este fabuloso contenido con el cual, esperamos puedan desvelar los secretos de esta emocionante disciplina de una forma idónea, sobre todo, si estudiantes de Educación Media / Bachillerato (12-18 años). Facilitando así, que como jóvenes estudiantes puedan comprender los fundamentos de la Robótica como disciplina interdisciplinaria, puedan identificar los componentes esenciales de un Robot, y entre muchas otras cosas más, puedan reconocer el impacto social de la Robótica en nuestro mundo actual, además de que puedan disfrutar y aprovechar la Robótica educativa como una herramienta para el desarrollo de competencias científicas y lógicas.

Como Docente de Educación Media (Bachillerato), he diseñado esta Clase Magistral que aborda la Robótica de manera integral, equilibrando los fundamentos teóricos con el enfoque práctico y pedagógico, ideal para estudiantes de entre 12 y 18 años. Ingeniero en Informática + Tutor CBIT: José Albert
¡Construye el Futuro! Una Clase Magistral de Robótica para Jóvenes Estudiantes y Futuros Ingenieros
Vídeo+Pódcast IA: Introducción al contenido
1. ¿Qué es la Robótica y por qué se llama «Robot»?
La robótica se define como una ciencia que aglutina varias ramas tecnológicas (o disciplinas) con el objetivo de diseñar máquinas programadas para realizar tareas de forma automática o para simular el comportamiento humano o animal. Es, en esencia, el estudio de los robots.
En consecuencia, y en sentido más amplio, se puede decir sobre la misma lo siguiente:
La robótica es la ciencia que estudia el diseño y la implementación de robots, conjugando múltiples disciplinas, como la mecánica, la electrónica, la informática, la inteligencia artificial y la ingeniería de control, entre otras. Entendiendose por Robot a aquellas máquinas automáticas o autónomas que poseen cierto grado de inteligencia, capaz de percibir su entorno y de imitar determinados comportamientos del ser humano. Y que se utilizan para desempeñar labores riesgosas o que requieren de una fuerza, velocidad o precisión que está fuera de nuestro alcance. También existen robots cuya finalidad es social o lúdica.
La Historia detrás de la Palabra
El origen de la palabra «robot» es fascinante. No nació en un laboratorio, sino en el teatro. En 1920, el novelista y dramaturgo checo Karel Capek utilizó el término en su obra R.U.R. (Robots Universales de Rossum). La palabra proviene del checo robota, que significa «trabajo forzado» o «servidumbre». Esta idea inicial de los robots como trabajadores que aligeraban la carga humana se ha mantenido, aunque hoy con una visión mucho más amplia.
2. ¿Qué es Exactamente un Robot?
Un robot es una entidad autómata compuesta por mecánica artificial y un sistema electromecánico. Se diferencia de un bot (como un chatbot) en que el robot tiene componentes físicos y tangibles.
Para que una máquina sea considerada un robot, debe cumplir tres características fundamentales:
- Sensar: El robot debe tener sensores que le permitan recolectar datos del medio ambiente donde se encuentra (ej: cámaras, sensores ultrasónicos).
- Procesar: El robot utiliza un cerebro (procesador o microcontrolador) para analizar los datos que capta y convertirlos en decisiones.
- Accionar: Debe realizar una acción o movimiento en el mundo físico, utilizando actuadores o motores.
Sin embargo, a más detalles podriamos preguntranos y responder lo siguiente:
Un robot ¿ha de tener forma humana, siquiera vagamente? ¿Un autómata del siglo XVII es un robot? Si la forma humana no es relevante, ¿puede un vehículo autónomo considerarse un robot? ¿Y una lavadora inteligente? ¿Todas las máquinas que poseen capacidad de procesar información externa son robots? ¿Un PC es un robot?
Pues, uno de los padres de la robótica industrial (una categoría bien definida de robots), Joseph Engelberger, declaró en una ocasión que él no sabría definir la palabra «Robot», pero que sabía reconocer uno en cuanto lo veía. Por lo que, dependiendo del lugar o personas, puede no haber un consenso generalizado sobre la definición precisa de robot, y muchas discusiones sobre si determinada máquina puede calificarse como tal, pero sí hay cierto acuerdo en que el requisito fundamental es el que puede resumirse en el ciclo percibe-piensa/planifica-actúa.
Características mínimas y esenciales de un Robot
Sin embargo, y en consecuencia, un Robot ha de ser capaz de:
- Percibir su entorno mediante sensores (dependiendo de lo que se espera de la máquina dichos sensores serán más o menos sofisticados),
- Decidir, si existen diferentes alternativas, cuál es el curso de acción más conveniente para alcanzar los objetivos encomendados acorde con su programación (el término «pensar» incomoda a muchos científicos por designar una actividad humana sobre la que aún hay muchos interrogantes, y prefieren los términos más precisos de «toma de decisiones» para evaluar acciones de efectos inmediatos, o «planificación» si se trata de determinar una secuencia de acciones que llevarán a la meta)
- Llevar a cabo acciones en un entorno físico a través de sus actuadores, acciones que van desde meros desplazamientos hasta el traslado o manipulación de objetos, modificación de su propia estructura, interacción con personas, etc.
Sin embargo, y para simplificar y ajustarnos a algo más universal, podríamos simplemente ceñirnos a la Norma ISO 8373:2021, (la cual nos proporciona un vocabulario de términos y definiciones relacionadas para su uso en documentos ISO relacionados con la robótica), que nos dice que:
Un robot es un «mecanismo accionado y programable con un grado de autonomía (capacidad para realizar tareas previstas basadas en el estado actual y la detección, sin intervención humana) para realizar una acción de locomoción, manipulación o posicionamiento».
Así pues, nadie calificaría un termostato de robot, pero tampoco una casa domótica donde un ordenador central, programado de acuerdo con las preferencias de sus habitantes, regula el conjunto de termostatos del hogar, además de las luces, persianas, limpieza, comunicaciones, o accesos: por sofisticada que sea, ya que, a pesar de ser programable, falta la componente del movimiento en un entorno (aunque, este argumento no es incontrovertible, ya que la apertura y cierre de ventanas conlleva el movimiento de una parte del conjunto, como en un robot reconfigurable).
Otro ejemplo, más sutil, es el caso de un automatismo de actuadores neumáticos (sistemas «cilindro-émbolo» actuados por aire a presión): El cual, puede ser programado si es controlado mediante un PLC, pero esta programación solo se refiere a la secuencia, el orden en que son activados los actuadores, pero no se puede variar por programa la posición de los mismos, que viene dada por los extremos del recorrido del émbolo. Por consiguiente, tampoco son robots, ya que estos pueden posicionarse en cualquier punto de su espacio de trabajo.
Partes de un Robot
En un robot, al igual que en un ser vivo (humano o no), cabe distinguir su parte tangible (hardware/cuerpo) y su parte no tangible (software/mente).
- Hardware: Es la parte física del robot, su cuerpo, a través del cual interacciona con su entorno. Por ende, se le puede dividir en las siguientes partes:
- Estructura o soporte: En el caso de un brazo, la estructura consiste en una serie de elementos rígidos conectados entre sí mediante articulaciones, que pueden ser rotativas (giratorias, como el codo humano) o lineales (prismáticas, como el par cilindro-émbolo). Dichos elementos pueden estar conectados en serie (es decir, uno detrás de otro, como en el brazo humano), o en paralelo (como por ejemplo la plataforma de un simulador de vuelo). En el caso de un robot móvil, la estructura sería la plataforma que contiene los motores, sensores y electrónica, y si es un robot caminante también podríamos incluir la estructura de cada pata. De forma más genérica, la estructura es lo que da consistencia al cuerpo del robot, contiene algunos elementos como actuadores y sensores, y permite moverse al robot. Puede establecerse una analogía anatómica con el esqueleto.
- Actuadores o motores: Para seguir con la analogía, corresponderían a la musculatura del cuerpo. Son transductores de energía (generalmente eléctrica) en movimiento. La mayoría son motores eléctricos, que activan tanto las articulaciones de un brazo o de una pierna, como las ruedas de un vehículo. También pueden actuar sobre el cierre y abertura de una mano o pinza, el movimiento de la cabeza o de las cámaras, o de rasgos faciales de robots humanoides. Habitualmente incorporan algún tipo de reducción mecánica, para reducir la velocidad de salida del motor y aumentar la fuerza creada, y un codificador (encoder) que es un dispositivo que «lee» la posición de un eje (articulación) y la transforma en una señal digital. Estas señales sirven al controlador del robot para registrar en todo momento la configuración (la pose) del robot, es lo que se conoce como propiocepción. En muchos casos, será necesario algún tipo de transmisión mecánica, a través de engranajes, correas dentadas o incluso sistemas de cables y poleas, para llevar el movimiento generado en el actuador hasta la articulación a la que mueve (por ejemplo, en un brazo los motores suelen situarse cerca de la base para reducir el peso y las fuerzas de inercia del robot).
- Sensores: Son dispositivos que informan al robot sobre su propio estado (por ejemplo, los ya mencionados codificadores, también podríamos incluir los medidores de carga de la batería) y sobre el estado del entorno. Centrándonos en estos últimos, pueden ser tan simples como un detector de presencia o proximidad (por ejemplo, una célula fotoeléctrica) que informa sobre la presencia de una pieza que puede ser agarrada por el robot, o tan complejos como las cámaras de un sistema de visión, sensores de fuerzas y momentos montados en la muñeca de un robot (informan sobre las fuerzas ejercidas en la garra del robot), o la piel artificial (matrices de detectores de contacto, de presión, quizá también otras variables como la temperatura, etc.). Un robot también puede incorporar micrófonos para registrar los comandos verbales que le comunica oralmente el usuario.
- Electrónica de potencia y procesamiento: Comprende tanto la electrónica de potencia (la que regula el suministro energético a los actuadores) como la de control y el ordenador (con los típicos componentes como procesadores, memorias, disco duro, entre otros). Este último se encarga del control a más alto nivel, básicamente de interpretar los programas almacenados en función de la información suministrada por los sensores, y en consecuencia enviar señales de activación a los diferentes actuadores. Es la presencia del ordenador la que confiere su versatilidad al robot, su adaptabilidad, sofisticación y facilidad de reprogramación. El robot puede contar con una unidad de programación para introducir los programas, o estos pueden ser escritos en un PC de propósito general y luego transferidos a la memoria del ordenador del robot. En los brazos manipuladores, la electrónica de potencia, el ordenador y la unidad de programación suelen estar separados del brazo, integrados en un armario de control. En un robot móvil, en cambio, tanto la electrónica de control como la batería que suministra energía al robot van a bordo.
- Elementos Terminales: Son los dispositivos que permiten al robot realizar acciones sobre su entorno. El más común es la pinza (de dos dedos), la garra o la mano (antropomórfica o no, es decir, este término suele aplicarse cuando hay más de dos dedos) para agarrar y desplazar objetos, o realizar otro tipo de manipulaciones sobre los mismos. Algunos investigadores intentan emular la versatilidad y la destreza de la mano humana, lo cual, hoy en día, ya es casi un reto logrado. Otros elementos terminales, como se ha apuntado antes, pueden ser herramientas variadas. Por ejemplo, la más utilizada, por la masiva presencia de robots en la industria automovilística, es la pinza de soldadura por puntos, también son frecuentes las herramientas de corte (convencionales, por láser, plasma o chorro de agua), las pisto las de aplicación de pinturas y lacas, herramientas de lijado y pulido, entre otras. Los robots de exploración pueden llevar «dispositivos medidores, recolectores y analizadores».
- Otros dispositivos: Dependiendo de sus características, el robot puede incorporar dispositivos que faciliten la interacción del robot con el usuario, como una pantalla gráfica o un sintetizador de voz y altavoces para la comunicación oral, elementos estilísticos o decorativos, entre otros. Lo que, en realidad, muchas veces viene a ser una mejora extendida de sus sensores (sentidos: Visión, Audición, Tacto, Habla, y Gusto).
- Software: Es la parte intangible del robot, su programación. En su forma más simple, consiste en una secuencia de especificaciones de acciones expresadas en el lenguaje de programación del robot, que incluye un repertorio limitado de instrucciones de movimiento (que se interpretan como algo del tipo «ve a la posición 12 a velocidad 0.8»), de accionamiento del elemento terminal («abre/cierra pinza»), e incluso de control del flujo del programa (bucles tipo «mientras haya piezas en la cinta transportadora, colócalas en cajas» o saltos condicionales «si hay pieza en el alimentador J entonces ejecuta las instrucciones 14-18, si no ejecuta las instrucciones 56-61»). Todo ello en un lenguaje formal propio del fabricante, y donde parámetros tales como «posición 12» o «alimentador J» se han especificado con anterioridad, por ejemplo, guiando manualmente el robot a las posiciones en cuestión y asignándolas dichos nombres. La mayoría de robots industriales actuales se programan de este modo, y todo lo más requieren simples formas de percepción (por ejemplo, detectar la presencia o ausencia de una pieza en un lugar especificado). Ello es posible gracias a que estos robots trabajan en un entorno controlado, es decir, donde cada cosa está en su sitio y no hay imprevistos. La situación cambia radicalmente en el caso de robots de servicios, sociales o de exploración. En estos casos, el robot debe desenvolverse en un mundo cambiante, lleno de contingencias inesperadas, de información incompleta o no precisa. Es evidente que, en estas circunstancias, el robot requiere un sistema sensorial que le proporcione una descripción actualizada del entorno. Si el robot es una aspiradora autónoma que circula por la casa, no precisará un sistema de sensores muy sofisticado, bastará que detecte obstáculos y localice el cargador de la batería. El software de control podrá equipararse al de un insecto en el mejor de los casos. En cambio, si ha de interactuar con su propietario, distinguirlo de otras personas, conocer sus preferencias y mantener una conversación estimulante, necesitará un sistema robusto de reconocimiento facial, así como diversas técnicas de IA avanzadas como las ya existentes en la actualidad. En cualquier caso, el hecho de que el comportamiento esté condicionado por software, sea codificado por un programador o aprendido por observación, es uno de los rasgos distintivos del robot. Por consiguiente, un autómata como los que fueron muy populares entre los siglos XVIII y XIX no es un robot a pesar de su apariencia humanoide, la sofisticación de sus movimientos y su naturaleza mecánica, puesto que para variar la tarea que está realizando será necesario introducir modificaciones físicas en el mecanismo, como cambiar el sistema de levas que rige los movimientos de las manos de la clavecinista de los hermanos Droz. En cambio, un pariente próximo son las máquinas de control numérico o las impresoras 3D, que crean piezas físicas a partir de las especificaciones de un programa.
Explorar Libro PDF: Robotica e Inteligencia Artificial
Tipos de Robots según su funcionalidad
De acuerdo con su aspecto físico, muy ligado a su funcionalidad, los robots pueden clasificarse de acuerdo con la siguiente tipología:
- Brazos manipuladores o brazos robóticos (manipulators, robotic arms): Es el tipo más extendido en la industria, y también está muy presente en los laboratorios de investigación. Son mecanismos poliarticulados, accionados por motores, con un elemento terminal en un extremo que puede ser una garra, mano o pinza para agarrar y desplazar objetos o realizar algún tipo de manipulación, o una herramienta (de cor te, soldadura, pintura, entre otros). Habitualmente son fijos (la base está anclada en el suelo o suspendida de una estructura), pero también pueden estar montados sobre una plataforma móvil.
- Robots móviles: Su principal característica es que son capaces de desplazarse de un lugar a otro. Suelen hacerlo sobre ruedas, si el suelo es más o menos liso, y sobre patas u orugas si el terreno es abrupto (o ruedas montadas sobre mecanismos con cierta flexibilidad, como los rovers de exploración espacial). También hay robots que se desplazan por el medio acuático (robots experimentales, de inspección y de exploración) y aéreo (vehículos aéreos no tripulados, drones). En esta categoría se incluyen desde los AGV (automated/autonomous guided vehicle) empleados en logística industrial hasta el vehículo autónomo.
- Robots humanoides: Son robots de apariencia antropomórfica, aunque esta similitud no necesariamente ha de ser muy fidedigna, aceptándose como tales incluso robots que se desplazan sobre ruedas o torsos (con brazos y cabeza) fijos. Lo más relevante es que disponga de extremidades superiores (preferentemente dos) y algo que pueda interpretarse como un rostro para facilitar la comunicación. Algunos investigadores ponen el énfasis en la funcionalidad, es decir, robots que se puedan desplazar sobre 2 piernas y coger cosas con los brazos, mientras que otros buscan un aspecto lo más humano posible, tal como ya existen muchos en empresas u hogares, realizando labores de almacenamiento y ensamblaje, o actividades domésticas y de limpieza.
- Robots experimentales: En este ámbito se pueden incluir aquellos que van desde robots biomiméticos hasta robots autoreconfigurables, micro y nanorobots, ro- bots accionados por cables, y otras pruebas de concepto tanto mecánicas como de control.

Tipos de Robots según sus objetivos de trabajo
Robots industriales
Son aquellos que son esencialmente manipuladores multipropósito reprogramables y automáticamente programables, en tres o más ejes, que pueden ser fijos o fijados a una plataforma móvil para su uso en aplicaciones de automatización en un entorno industrial o muy específico. Estos suelen incluir un elemento manipulador (controlado por el controlador del robot), un elemento controlador y un elemento de configuración/programación (por medio del cual, se le comunicará, enseñará o programará lo necesario). En consecuencia, estos suelen estar dedicados como Robots obreros en fábricas, minas, campos agrícolas, agropecuarios y pesqueros, en lugares para la exploración profunda (subterránea, submarinas, aéreas y espaciales). También aquellos dedicados a la construcción y mantenimiento de áreas, edificaciones y maquinarias, al transporte de personas y mercancías, y hasta de actividades militares y científicas.
Robots de servicio, domÉsticos y sociales
Son aquellos que son esencialmente dedicados al uso personal o uso profesional, y que por ende, realizan tareas útiles para humanos o equipos de trabajo. Por ejemplo, los robots de servicio para las tareas de uso personal incluyen el manejo o la porción de artículos, el transporte, el apoyo físico, la orientación o la información, el aseo, la cocina y la manipulación de alimentos, y la limpieza. Mientras que, aquellos robots de servicio para las tareas de uso profesional incluyen inspección, vigilancia, manejo de artículos, transporte de personas, proporcionar orientación o información, cocinar y manipular alimentos, y limpieza. Por otro lado, los robots que ponen énfasis en la interacción con los seres humanos constituyen la categoría de robots sociales, como aquellos que suelen ofrecer compañía y soporte a niños, ancianos y enfermos. Y por último, están los Robots domésticos, que son aquellos que ponen énfasis en la adaptación al usuario (o grupo reducido de usuarios, como una familia, por ejemplo). Estos robots, además de venir de fábrica con una serie de habilidades manuales y sociales, e incorporan una gran capacidad de aprendizaje. Por ende, en esta categoría entran todos los robots que se mueven en el ámbito doméstico, lo que incluye desde sencillos robots de limpieza hasta robots más sofisticados que actuarían a guisa de mayordomo o de secretario personal, robots de entretenimiento, y hasta compañeros sexuales o sentimentales.
Robots Médicos
Son aquellos que son esencialmente destinados a ser utilizado como equipo eléctrico, médico o sistemas eléctricos médicos. Por lo que, un robot médico no se considera como un robot industrial o un robot de servicio.
3. La Historia: De Mitos a Gigantes Industriales
Aunque la robótica como ciencia moderna surgió en los años 60, la inquietud de crear máquinas que imitaran a los humanos existe desde hace mucho.
Orígenes Antiguos
Desde siempre, las personas han querido desarrollar seres animados con diferentes fines. Este deseo de dar vida, conjugado con el progreso mecánico, científico, tecnológico y electrónico a lo largo de la historia, dio lugar a la creación de los autómatas, máquinas que imitan la figura y los movimientos de un ser animado, antecedente directo de los robots. Por ello, los primeros autómatas se remontan a la Antigüedad: egipcios y griegos fueron pioneros en el desarrollo de la mecánica y la ingeniería. Conocían y utilizaban a la perfección principios mecánicos como la rueda, el eje, la cuña, la palanca, el engranaje, la rosca y la polea, elementos que constituyen la base de muchos mecanismos empleados en la actualidad. Tenían también un profundo conocimiento de hidráulica y neumática, que usaban para dar movimiento a algunas estatuas.
Por ejemplo, ya en el siglo VIII a.C., en los textos atribuidos a Homero, se menciona a Hefestos, el dios griego de los metalúrgicos, que desarrollaba artefactos mecánicos y robots, como Talos, destinado a defender una isla. Más tarde, alrededor del 300 a.C., en Alejandría, el ingeniero Herón de Alejandría es considerado por muchos como el mayor experimentador de la antigüedad y, algunos, como el padre de la robótica por sus inventos. Ya que, escribió el primer tratado de robótica, los autómatas, y creó los primeros autómatas: el teodolito, un aparato que medía ángulos, distancias y desniveles, y el odómetro, que medía distancias recorridas.
Mientras que, durante la Edad Media, dos personajes se destacaron por sus invenciones. El primero, Alberto Magno (1206- 1280), el cual creó un autómata de hierro que le servía como mayordomo y podía caminar, abrir puertas y comunicarse con los invitados; y una cabeza parlante que predecía el futuro. El segundo, Al-Jazari, uno de los más grandes ingenieros de la historia, el cual inventó un reloj elefante, con seres humanos y animales mecánicos.
Y, por otro lado, en una época más reciente (el Renacimiento) donde hubo un período rico en pensadores e invenciones, se dejó constancia del enorme interés por la investigación en el campo de las ciencias que explican al mundo y al ser humano, impulsó el desarrollo de espectaculares maquinarias. Por ejemplo, Leonardo Da Vinci (1452-1519), que quizás fue el más grande inventor de todos los tiempos, creó, entre otras, la máquina de volar. El matemático y filósofo Blaise Pascal (1623-1662), un destacado representante del racionalismo, inventó la primera máquina de calcular. Además, durante la misma época, la corriente de pensamiento de René Descartes (1596-1650) se sostuvo en el postulado de que todo se explica a través de las matemáticas. También, tomó al ser humano como referente y antecesor primero de toda maquinaria. Por su parte, el ingeniero e inventor Jacques de Vaucanson (1709-1782) creó un pato artificial que movía las alas y realizaba el proceso digestivo completo, y dos músicos autómatas: El flautista y El tamborilero, que podían tocar un amplio repertorio musical.
La Era Industrial y la Robótica Moderna
Por último, y de forma más actual, la verdadera evolución se dio en el siglo XX, especialmente después de los años 50, con el desarrollo de los teleoperadores (manipuladores de control remoto) para manejar materiales peligrosos. Así, se puede considerar que, mientras la Robótica de primera generación eran máquinas sencillas controladas secuencialmente y mayormente de forma manual; la segunda generación fue un avance en cuando a su movimiento mecanizado, mientras que la tercera generación marcó el inicio de los robots inteligentes con lenguajes de programación y capacidad limitada para captar información del entorno.
Ya la cuarta generación puede distinguirse por la miniaturización, digitalización y portabilidad de los Robots. Sin embargo, muchos consideran que ya estamos entrando en la quinta generación, con Robots muchos más inteligentes e interactivos, gracias sobre todo, al uso de Inteligencia Artificial y el uso de formas mecanizadas que igualan, y a veces hasta superan, la efectividad de la corporalidad humana.
4. Las Leyes de la Robótica
Orígenes
En la década de 1940, Isaac Asimov (Bioquímico estadounidense de origen soviético: 1920/1992) enunció las tres leyes de la Robótica:
1. Ley de la robótica número uno
«Un robot no hará daño a un ser humano ni, por inacción, permitirá que un ser humano sufra daño.»
Esta ley establece que la primera y principal prioridad de un robot es evitar causar daño a los seres humanos. Esto incluye no solo acciones deliberadas, sino también la omisión de acciones que permitirían que ocurra un daño. En esencia, un robot no puede ser programado para ser negligente, de manera que ponga en peligro la vida o la integridad de un ser humano.
2. Ley de la robótica número dos
«Un robot obedecerá las órdenes dadas por los seres humanos, excepto si tales órdenes entraran en conflicto con la Primera Ley.»
Esta segunda ley implica que los robots están diseñados para servir a los seres humanos y cumplir sus órdenes y deseos, siempre y cuando no entren en conflicto con la primera ley. Si una orden humana pone en peligro la vida o la seguridad de un ser humano, el robot tiene la obligación de desobedecer.
3. Ley de la robótica número tres
«Un robot protegerá su propia existencia siempre y cuando dicha protección no entre en conflicto con la Primera o la Segunda Ley.»
La tercera ley establece que un robot debe preservar su propia existencia, pero solo si al hacerlo no infringe la primera o la segunda ley. En otras palabras, un robot no puede sacrificar a un ser humano para salvarse a sí mismo, a menos que haya una orden humana que le indique hacerlo.
4. Ley de la robótica número 4: Ley Cero (0)
El propio autor añadió cuatro décadas más tarde, en 1985 en su obra Robots e imperio, la considerada como cuarta ley de la robótica, llamada Ley Cero. En ella, Asimov afirmaba lo siguiente:
«Un robot no puede causar daño a la humanidad o, por inacción, permitir que la humanidad sufra daño.»
Actualidad
Un ejemplo de aplicaciones (leyes/reglas) actualizadas (y más centradas en el plano práctico que en el teórico/literario de Asimov) sería la de Robin Murphy y David D. Woods en el artículo del año 2009 Beyond Asimov: The Three Laws of Responsible Robotics.
Y en una traducción de Ignacio Gavilán, estas tres leyes de la robótica responsable son:
- Un humano no debe desplegar un robot sin que el sistema de trabajo humano-robot cumpla los más altos estándares legales y profesionales relativos a ética y seguridad.
- Un robot debe responder ante los humanos, en una manera adecuada al rol del humano.
- Un robot debe estar dotado de una suficiente autonomía contextualizada como para proteger su propia existencia, siempre y cuando dicha protección disponga de una transferencia de control sencilla a otros agentes de una forma consistente con la primera y segunda ley.
Ya en el año 2011, el Consejo de Investigación de Ingeniería y Ciencias Físicas (EPSRC) y el Consejo de Investigación de Artes y Humanidades (AHRC) de Reino Unido publicaban sus cinco principios éticos para diseñadores, constructores y usuarios de robots:
- Los robots no deben diseñarse única o principalmente para matar o dañar a los humanos.
- Los humanos, no los robots, son los agentes responsables. Los robots son herramientas diseñadas para alcanzar objetivos humanos.
- Los robots deben diseñarse de forma que garanticen su seguridad.
- Los robots son artefactos; no deben diseñarse para explotar a usuarios vulnerables evocando una respuesta emocional o dependencia. Siempre debe ser posible distinguir un robot de un ser humano.
- Siempre debe ser posible averiguar quién es legalmente responsable de un robot.
Por último, y para finalizar, en el año 2016, el CEO de Microsoft, Satya Nadella, propuso unas reglas para la inteligencia artificial, la cual, es un campo altamente asociado a la Robótica, y estas son las siguientes:
- Debe ayudar a la humanidad y respetar su autonomía.
- Ha de ser transparente y explicable para entender por qué los algoritmos toman determinadas decisiones.
- Debe maximizar la eficacia sin destruir la dignidad de las personas.
- Ser diseñada para preservar la privacidad de manera inteligente.
- Debe tener responsabilidad algorítmica.
- Estar protegida frente a los estereotipos o sesgos.
Otros principios a tener en cuenta en las reglas para la Inteligencia Artificial son:
- También debe de ser sostenible, teniendo en cuenta el impacto ambiental y social a largo plazo.
- Debe ser segura y resistente a ataques y vulnerabilidades.
- Debe de ser justa, evitando la discriminación y promoviendo la equidad en la sociedad.
Por lo cual, es evidente que, desde que fueron enunciadas por Asimov en el ámbito literario en 1942, la evolución de la tecnología en general, de la Robótica y la IA en particular, ha hecho que las leyes de la Robótica (e incluso ya de la Inteligencia Artificial) hayan tenido que ir adaptándose a las nuevas realidades que se han ido presentando con el paso del tiempo.
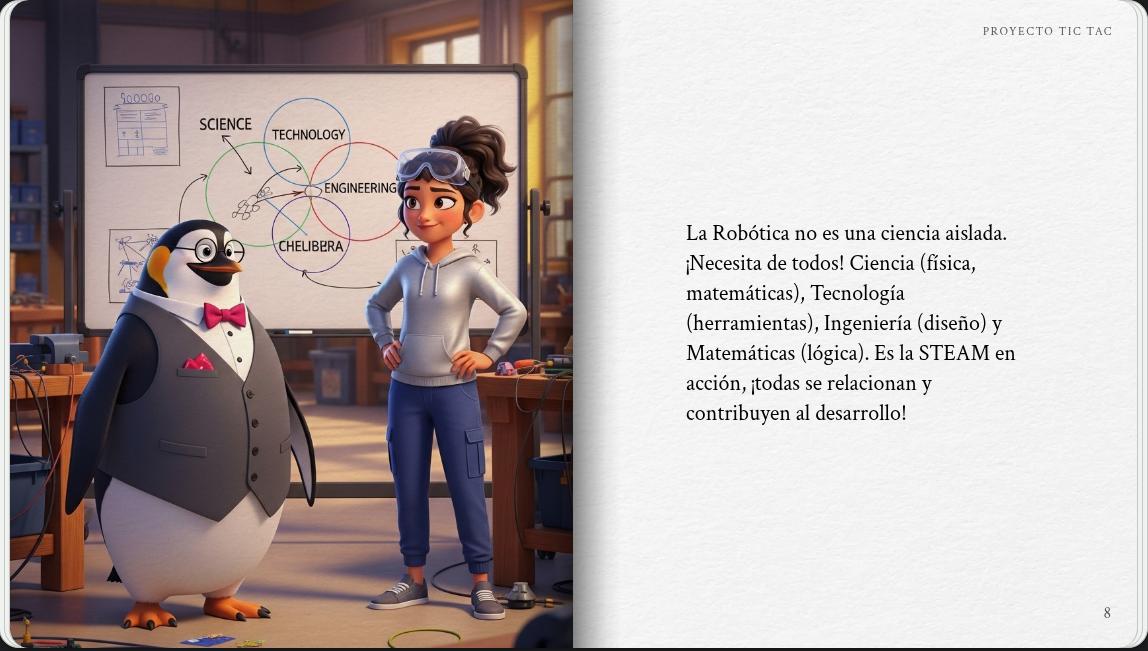
5. Las Ciencias asociadas que hacen posible la Robótica de hoy en día
La robótica es inherentemente multidisciplinaria. Para diseñar un robot se emplea la Ingeniería Mecatrónica, que integra:
| Ciencia de Apoyo | Contribución en la Robótica |
|---|---|
| Mecánica y Física | Determinan la estructura, el movimiento (cinemática), el diseño de engranajes y la resistencia de los materiales. |
| Electrónica y Electricidad | Fundamentales para la alimentación (baterías) y el diseño de circuitos que permiten a los motores y sensores funcionar. |
| Informática y Computación | Permiten la programación, el diseño de algoritmos, y la interfaz de control. |
| Inteligencia Artificial (IA) | Esencial para que el robot pueda tomar decisiones autónomas basadas en el análisis de datos (Machine Learning). |
6. El Futuro Probable de la Robótica (Próximos 25 años)
El futuro de la Robótica se define esencialmente, por un lado, con la fusión con la Inteligencia Artificial. Ya que, hoy en día, los avances en Machine Learning y Deep Learning (tipos de IA) están marcando un punto de inflexión, permitiendo a los robots mejorar sus prestaciones y capacidad de interacción. Mientras que, por otro lado, el avance en la creación de nuevas estructuras (esqueletos robóticos) harán que los Robots estén en todos lados, igualando y superando las habilidades y capacidades físicas humanas, en muchos casos.
Debido a eso, muchos expertos coinciden en que los robots servirán como el cuerpo físico de la inteligencia artificial. Y que esto permitirá a la IA percibir el mundo y actuar sobre él con versatilidad. En consecuencia, los robots del futuro, conocidos como Robots 5G o de quinta generación, sin duda alguna, incorporarán sistemas de IA de punta y modelos conductuales avanzados.
Además, la fusión Interdisciplinaria de la robótica ligada a otros grandes avances científicos en el ámbito cuántico podrían elevar exponencialmente los desarrollos de la Robótica. Por ejemplo:
- Bioingeniería y Nano-Robótica: La incorporación de la biotecnología y la nanotecnología permitirá la creación de robots capaces de realizar tareas científicas y médicas a nivel microscópico. También continuará el desarrollo de prótesis biónicas y exoesqueletos.
- Avances Cuánticos (Implícitos): El progreso en la física cuántica permitirá la precisión necesaria para la microelectrónica. Aunque la Computación Cuántica es compleja, su impacto se verá en la precisión de los sensores y en la capacidad de procesamiento de los robots.
7. La Robótica Educativa: Un Enfoque Lúdico y STEM
La Robótica Educativa es un método didáctico multidisciplinario que permite a los estudiantes diseñar, construir y programar robots. Su objetivo no es solo lograr que se adapten a la tecnología, sino desarrollar habilidades motoras, sociales y de trabajo en equipo, reforzando conocimientos en otras ciencias.
Hitos y Personajes Clave
Esta disciplina tiene sus orígenes en los trabajos de Seymour Papert y otros científicos del Laboratorio de Medios del Instituto Tecnológico de Massachusetts (MIT) en la década de los 60. Papert promovió el Constructivismo y el concepto de «aprender haciendo» (Learning by doing).
La robótica educativa se apoya en la metodología STEAM (Ciencias, Tecnología, Ingeniería, Arte y Matemáticas).
Experiencias Globales
- España: La robótica es un tema obligatorio en la educación secundaria, incluyendo el trabajo con sistemas automáticos, sensores y actuadores. Proyectos como COMPLUBOT buscan difundir esta enseñanza.
- Chile: Los talleres usan kits como Lego NXT y Parallax, promoviendo la construcción y programación para llevar a la práctica conceptos teóricos de Educación Tecnológica.
- Venezuela: Donde, desde hace pocos años, y de la mano de Fundabit y el CNTI, se modernizan los contenidos educativos y laboratorios de informática (Centros Bolivarianos de Informática y Telemática + Semilleros Científicos) enfocados en el estudio y aprendizaje de la Robótica y uso de la Inteligencia Artificial para formar con éxito una nueva generación de Científicos Tecnológicos e Ingenieros Informáticos integrales. Tal como ha quedado demostrado en la presencia y premiación de jóvenes estudiantes dentro de competiciones robóticas internacionales.
- Kits de referencia: Los kits LEGO Mindstorms (EV3 o NXT) son populares globalmente, ya que combinan piezas y un controlador programable con una interfaz fácil de usar. También se usan entornos de programación como Scratch y Arduino.
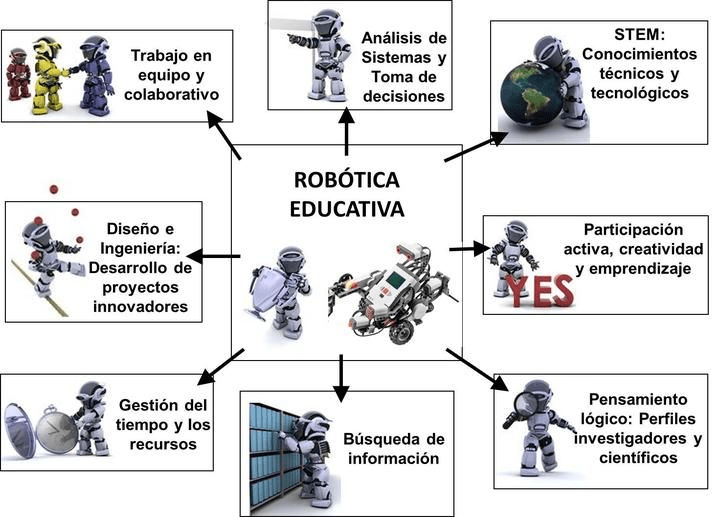
Beneficios clave de la Robótica educativa
- Desarrolla el pensamiento lógico,
- Aumenta la capacidad de solucionar problemas,
- Fortalece la habilidad del trabajar en equipo,
- Fomenta la creatividad y la innovación.
- Incrementa las posibilidades de éxito profesional y laboral de los estudiantes.
8. Vídeo, Pódcast y Libro de historietas complementarios sobre este contenido elaborado
Y para ir finalizando este contenido, te recomendamos ver, escuchar y leer el siguiente Vídeo, Pódcast e Libro de Historieta elaborado con todo este contenido y mediante IA, para que aclares y consolides todo este fabuloso conocimiento de una forma más fácil y entretenida.
9. Herramientas y Recursos webs y móviles (apps, webapps y juegos) para la Programación en bloques, la Robótica creativa, el Diseño eléctrico/electrónico asistido por computadora, el Modelado 3D, y más
Apps en Línea
- App Inventor: Plataforma web educativa ideal para crear aplicaciones en línea propias.
- App Lab: Ambiente de programación en línea idóneo para crear aplicaciones sencillas.
- ArduinoBlocks: Plataforma en línea y gratuita que emplea bloques al estilo de Scratch.
- Bricklife Scratch GUI: Una útil interfaz web de Scratch 3.0 con extensiones de LEGO.
- CircuitJS1 Desktop Mod: Simulador web de circuitos integrados ideal para fines educativos.
- Code.org: Plataforma en línea para el aprendizaje de diversos lenguajes de programación.
- CodeClub Projects: Proyectos gratuitos de programación y computación para aprender y enseñar.
- Codecraft: App de programación gráfica basada en el lenguaje Scratch 3.0.
- Coddy Tech: Plataforma en línea para aprender sobre los fundamentos de la programación.
- Hello Blocks!: Plataforma en línea diseñada para aprender sobre programación y robótica.
- Just fucking use HTML: Web sencilla y práctica para aprender HTML puro y avanzado.
- Kodable: Plataforma educativa en línea para el fortalecimiento del pensamiento computacional.
- MakeCode Microbit: Plataforma de programación y robótica adecuada a los dispositivos Microbit.
- MicroBlocks Online: Ambiente de programación por bloques y en línea, inspirado en Scratch.
- MyCompiler: IDE en línea para editar, compilar y ejecutar código de lenguajes de programación.
- mBlock: Plataforma educativa en línea para aprender robótica basada en Scratch 3.
- Scratch Online: Ambiente de programación por bloques y en línea, oficial de Scratch.
- ScratchJr: Sitio web oficial de la versión infantil de Scratch.
- Snap!: Plataforma que ofrece un lenguaje de programación amigable para cualquier edad.
- Tinkercad: Aplicación web gratuita para realizar diseños 3D, circuitos electrónicos y codificación.
- TurboWarp Online: Ambiente de programación por bloques y en línea, inspirado en Scratch.
- W3Schools: Sitio web con tutoriales modernos sobre muchos tipos de lenguajes de programación.
Apps Móviles
- EasyCoder: App móvil para aprender HTML, CSS y JavaScript: Y también Python y Java.
- Enki: App con breves y divertidos ejercicios y lecciones diarias para aprender programación.
- Mimo: App para aprender a codificar en Python, JavaScript, HTML, CSS, TypeScript y SQL.
- Proto: App de simulación de circuitos electrónicos en tiempo real.
- Scratch Móvil: Ambiente de programación por bloques para Android, oficial de Scratch.
- Scratch Móvil Jr: Ambiente de programación por bloques para Android, oficial de Scratch.
- Simulador de Circuito Lógico: App para aprender sobre electrónica y diseño electrónico.
- Sololearn: App con breves y divertidos ejercicios y lecciones para aprender programación.
Juegos educativos (plataformas en línea) para aprender y enseñar Pensamiento Computacional
- Access Quiz Bases de Datos: Bases de Datos.
- Bit by Bit: Programación y Robótica.
- Blockly Games: Programación y Robótica.
- CargoBot: Programación y Robótica.
- Code.org: Programación.
- CodeHunt: Programación.
- Code Combat: Programación.
- Code Wars: Programación.
- Codédex: Programación.
- CodinGame: Programación.
- Cokitos Programadores: Programación.
- Crunchzilla: Programación.
- CSS Battle: Programación.
- CSS Diner: Programación.
- Cyber Dojo: Programación.
- Edubotika – Pilas Bloques 5: Programación
- Elevator Saga: Programación.
- Flexbox Defense: Programación.
- Flexbox Froggy: Programación.
- Knight Lab’s SQL Murder Mystery: Bases de Datos.
- Lightbot: Programación y Robótica.
- Learn Git Branching: Programación.
- Mobbyt BD: Base de Datos.
- Robocode: Programación y Robótica.
- RubyMonk: Programación.
- Ruby Warrior: Programación.
- Schemaverso: Bases de Datos.
- Screeps: Programación.
- SQL DDL – DML: Bases de Datos.
- SQL Island: Bases de Datos.
- SQL Police Departament: Bases de Datos.
- SQL SquidGame: Base de Datos.
- The Python Challenge: Programación.
- Tinker: Programación.
- Untrusted Game: Programación.
- VIM Adventures: Programación.
Juegos educativos para aprender sobre Ciberseguridad (Internet, RRSS, Privacidad y Anonimato)
- Band Runner: Ciberseguridad educativa.
- Ciber Mission: Ciberseguridad educativa.
- CyberScouts: Ciberseguridad educativa.
- CynGo: Ciberseguridad educativa.
- OverTheWire: Ciberseguridad práctica.
- SpaceShelter – Interland: Ciberseguridad educativa.
- TryHackMe: Ciberseguridad práctica.
Recursos en línea para perfeccionar y promover el trabajo del Docente en Tecnología Educativa (Programación, Robótica e Inteligencia Artificial)
- Academia STEAM Venezuela: Organización privada venezolana que ofrece varios modelos de alianzas para Instituciones Educativas que desean introducir un enfoque STEAM con el fin de lograr implementar un programa educativo que desarrollen integralmente las competencias digitales.
- AI for Good: Organización asociada a la Unión Internacional de Telecomunicaciones (UIT), el principal organismo de las Naciones Unidas para las tecnologías digitales, que promueve la creación, mejoramiento y enseñanza la las herramientas IA a todos los niveles.
- Bebras: Iniciativa internacional destinada a promover la Informática (Ciencia de la Computación, o Computación) y el pensamiento computacional entre los estudiantes de todas las edades.
- CS Unplugged: Proyecto en línea que ofrece una colección de actividades de aprendizaje gratuitas que enseñan Informática a través de interesantes juegos y puzles con la ayuda de cartas, cuerdas, lápices de colores y mucha actividad física.
- Do your :bit: Iniciativa global entre Micro:bit y el proyecto de los Objetivos globales de las Naciones Unidas que proporciona actividades inspiradoras a nivel educativo bajo el modelo de retos digitales.
- Editorial Aprender STEAM: Organizador nacional en Venezuela de la WRO, además es una organización privada que ofrece soluciones digitales educativas para colegios, mediante el aprendizaje basado en proyectos, usando las STEAM y la gamificación en forma transversal, enfocados en la resolución de retos.
- Free3D: Sitio web de modelos libres de regalías, lo que significa que no es necesario pagar regalías cada vez que se utiliza el modelo. También, ofrece muchos modelos 100% gratis.
- Fundabit: Fundación educativa venezolana encargada de promover la Informática y Telemática a nivel educativo en Venezuela.
- Infocentro: Sitio web venezolano de la institución nacional encargada de promover la Robótica creativa (educativa) en Venezuela.
- Khan Academy – Computación: Clases de Computación y Pensamiento computacional en línea dictadas por la organización educativa global Khan Academy.
- La Ciencia para Todos: Blog educativo con mucho material informativo y técnico sobre programación en bloques y robótica creativa.
- Picuino: Sitio web con una genial variedad de recursos educativos libres para profesores y alumnos de tecnología educativa en etapa secundaria.
- Programamos: Un sitio web con mucha variedad de archivos documentales y de trabajo para aprender programación en bloques y robótica creativa.
- Programo Ergo Sum: Más de 100 cursos y tutoriales libres y gratuitos para aprender informática, programación, electrónica y robótica educativa.
- Scratch Add-ons: Extensión de navegador web para Scratch que combina funciones y temas nuevos y existentes para el sitio web de Scratch y el editor de proyectos.
- Scratch Tactile: kit descargable para aprender pensamiento computacional basado en los diseños y la filosofía creativa de ScratchJr, la versión de Scratch para los más pequeños.
- STEAM Learning Lab: Organización privada que ofrece un espacio de aprendizaje y creación diseñado para promover las carreras STEAM (Ciencias, Tecnologías, Ingenierías, Artes y Matemáticas) en jóvenes venezolanas de comunidades vulnerables.
- Ultimate 2.0: Kit de Robótica avanzada 10 en 1. Explorar manual en inglés y español.
- World Robot Olympiad (WRO): Es la Asociación de la Olimpiada Mundial de Robótica, una organización independiente sin fines de lucro que promueve la robótica en la educación STEM a nivel mundial.
- WRO Venezuela: Sitio web oficial de la Asociación de la Olimpiada Mundial de Robótica, Capítulo Venezuela.
10. Cursos y Proyectos de Robótica creativa (creativa) gratuitos
- Robótica creativa (educativa) en YouTube – I
- Robótica creativa (educativa) en YouTube – II
- Robótica creativa (educativa) en YouTube – III
- Robótica creativa (educativa) en YouTube – IV
11. Autoevaluación con Google AI Studio y Google NotebookLM
WebApp Gamificada: Aventura Robótica – El Desafío final
Haz clic sobre la imagen superior y ejecuta el siguiente juego.
WebApp Gamificada: Robo Blaster – Quiz de Robótica
Haz clic sobre la imagen superior y ejecuta el siguiente juego.
Cuestionario y Ficha de Estudio
Haz clic en el siguiente enlace para abrir el Cuaderno de Google NotebookLM sobre Robótica y realiza la autoevaluación mediante el Cuestionario y Ficha de Estudio disponible.
Mapa mental
Y además, recuerda que en el mismo puedes utilizar en línea o descargar el Mapa mental o la Guía de Estudio (Resumen) para repasar y afianzar todos estos conocimientos.
12. Bibliografía usada y recomendada
Presiona en el siguiente enlace y explora diversos libros PDF donde podrás conocer un poco más sobre Robótica, Robótica educativa e Inteligencia Artificial.

Resumen
En resumen, la robótica no es solo una ciencia moderna y una materia escolar, sino una mentalidad y una forma de hacer y reinventar. Por ello, los invito a seguir la curiosidad que los llevó hasta aquí y a utilizar estos conocimientos y herramientas para construir, experimentar e inventar su propio futuro mediante la Robótica, la Inteligencia Artificial, y otras ciencias/conocimientos asociados, como la electricidad, la electrónica y la mecánica.
Por último, si esta publicación te ha gustado, no dejes de comentarla y compartirla con otros en tus sitios webs, canales, grupos o comunidades favoritas de redes sociales o sistemas de mensajería. Y, no olvides explorar luego, nuestra página de inicio para más contenidos y noticias, además de unirte a nuestro Canal y Grupo oficial de Telegram.

Gracias por tus comentarios…